
Suggested readings
Preconditions
What does the example
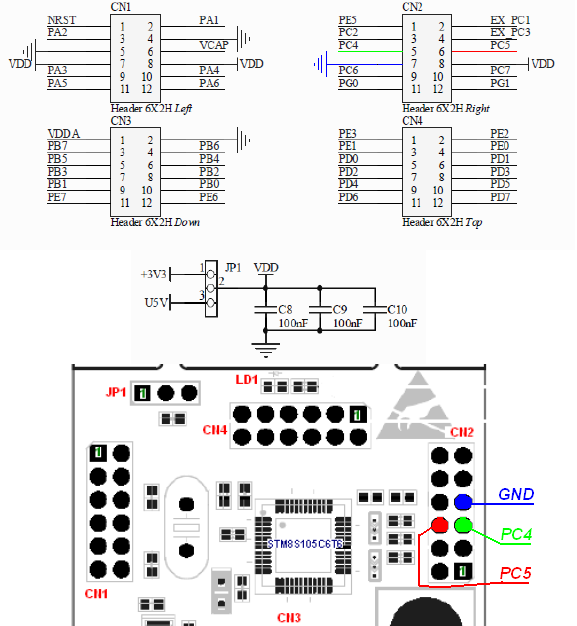
The connections on STM8S-Discovery
The FirmWare
-
Suggested readings:
-
Preconditions:
- The PC operating system is Windows XP SP3.
- On the PC are installed
the:
Cosmic C Compiler 32K free ver. 4.3.6
STM IDE 4.3.1 (ST Visual Develop - STVD)
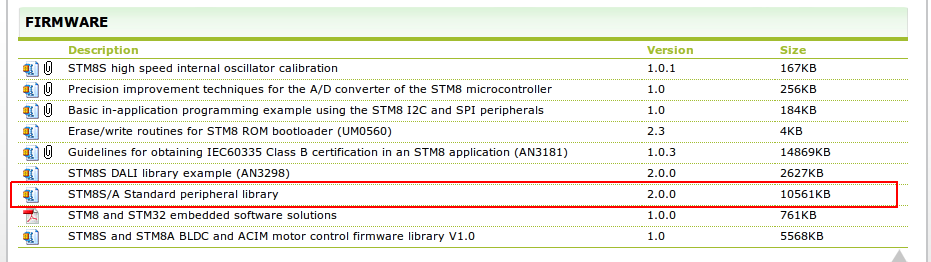
STM8S firmware library ver. 2.1.0 (see below)
- The example below is based on STM8S Discovery.
-
What does the example:
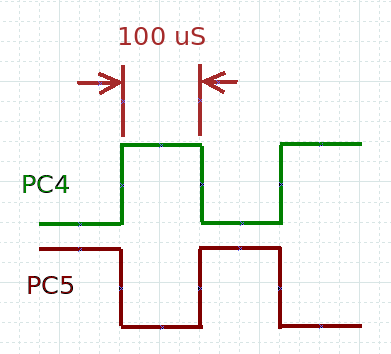
The example explains how to configure TIM1 and TIM4 to generate two time bases.
TIM1 Interrupt 100uS that drive PC4 and PC5 (see below)
TIM4 Interrupt 1mS that blink LED every 500mS.
All the SW works under Interrupt.
This SW was tested on STM8S Discovery.
Remember that there is also the example: How to configure TIM4 and test it on STM8S Discovery that analize in deep the TIM4.
-
The FirmWare:
The tree of the project is:
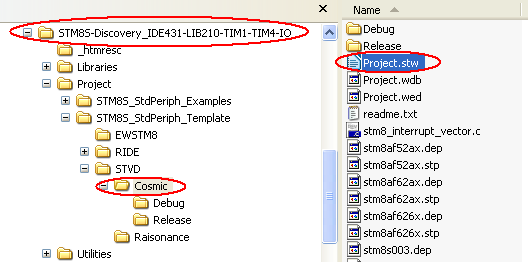
For open the project start STM IDE (ST VISUAL DEVELOP) and select:
File -> Open Workspace
go in the directory Cosmic and select:
Project.stw
go in the directory Cosmic and select:
Project.stw
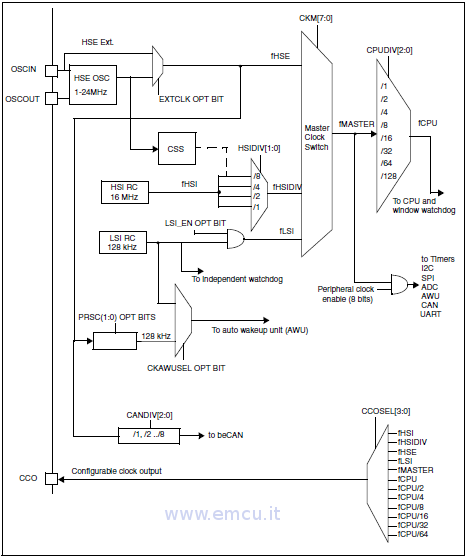
First, is important look the clock tree that is show below.
It is important select the clock source that you want to use in your application (default is HSI, RC osc. at 16Mhz).
In my application I'm using HSE clock source (OSCIN - OSCOUT).
It is important select the clock source that you want to use in your application (default is HSI, RC osc. at 16Mhz).
In my application I'm using HSE clock source (OSCIN - OSCOUT).
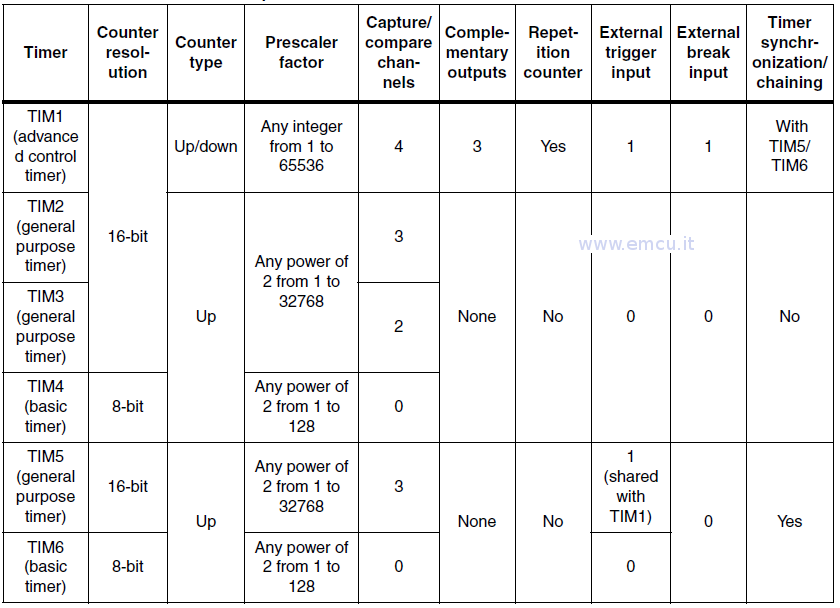
Second, is a good idea see the
TIMERs specification, see below.
The implementation of the
software was very easy because I used the STM8 Library.
configure
the HSE clock source
configure GPIO (see the file named: define.h)
configure TIM4
configure TIM1
enable interrupts
configure GPIO (see the file named: define.h)
configure TIM4
configure TIM1
enable interrupts
see below.
main.c
/*
www.emcu.it
By: Enrico M.
Date: 05-Febr-2012
ST Visual Develop: 4.3.1
Cosmic C Compiler: 4.3.6
STM Library: 2.1.0
PC: Vindows XP SP3
Tested on STM8S-Discovery
TEST POINT:
CN2 -> pin_6 and pin_5
On the pins you should see a square wave of about 0.1 mS.
The LED must blink arround of 500 mS
TIM4 - interrupt 1 mS
TIM1 - interrupt 100 uS
*/
/* Includes ------------------------------------------------------------------*/
#include "stm8s.h"
#include "define.h"
/* Private typedef -----------------------------------------------------------*/
/* Private define ------------------------------------------------------------*/
/* Private macro -------------------------------------------------------------*/
/* Private variables ---------------------------------------------------------*/
u16 tempo = 0;
/* Private function prototypes -----------------------------------------------*/
void TIM1_Config(void);
void TIM4_Config(void);
/* Private functions ---------------------------------------------------------*/
/* Public functions ----------------------------------------------------------*/
void Delay (uint16_t nCount);
/**
* @brief Main program.
* @param None
* @retval None
*/
void main(void)
{
// Configure Quartz Clock
CLK_DeInit();
CLK_HSECmd(ENABLE);
CLK_SYSCLKConfig(CLK_PRESCALER_HSIDIV1);
// Configure I/O x Buzzer
GPIO_Init(Port_BUZ1, BUZ1, GPIO_MODE_OUT_PP_LOW_FAST);
GPIO_Init(Port_BUZ2, BUZ2, GPIO_MODE_OUT_PP_LOW_FAST);
/* Initialize I/Os LED in Output Mode */
GPIO_Init(GPIOD, GPIO_PIN_0, GPIO_MODE_OUT_PP_LOW_FAST);
/* TIM1 configuration -----------------------------------------*/
TIM1_Config();
/* TIM4 configuration -----------------------------------------*/
TIM4_Config();
// SetUp BUZ1 & BUZ2
GPIO_WriteHigh(Port_BUZ1, BUZ1);
GPIO_WriteLow(Port_BUZ2, BUZ2);
// Enable Interrupts
enableInterrupts();
while (1)
{
}
}
/**
* @brief Configure TIM4 to generate time base 1mS
* @param None
* @retval None
*/
void TIM4_Config(void)
{
CLK_PeripheralClockConfig (CLK_PERIPHERAL_TIMER4 , ENABLE);
TIM4_DeInit();
/* Time base configuration */
TIM4_TimeBaseInit(TIM4_PRESCALER_128, 0x7D); // 127 and 0x7D == Interrupt 1mS
TIM4_ITConfig(TIM4_IT_UPDATE, ENABLE);
TIM4_Cmd(ENABLE); // Enable TIM4
}
/**
* @brief Configure TIM1 to generate time base
* @param None
* @retval None
*/
void TIM1_Config(void)
{
CLK_PeripheralClockConfig (CLK_PERIPHERAL_TIMER1 , ENABLE);
TIM1_DeInit();
TIM1_TimeBaseInit(16, TIM1_COUNTERMODE_DOWN, 92, 0); //timer freq = (clock CPU/16) -> 1bit = 1uS -> 92*1uS=92uS
TIM1_ITConfig(TIM1_IT_UPDATE, ENABLE);
TIM1_Cmd(ENABLE);
}
void BuzOsc2(void)
{
static u8 porta=0;
GPIO_WriteReverse(Port_BUZ1,BUZ1);
porta=GPIO_ReadOutputData(Port_BUZ1);
if (ValBit(porta,5)) GPIO_WriteLow(Port_BUZ2,BUZ2); // Attenzione 5 per poterlo usare con STM8S-Discovery
else GPIO_WriteHigh(Port_BUZ2,BUZ2);
}
/**
* @brief Delay
* @param nCount
* @retval None
*/
void Delay(uint16_t nCount)
{
/* Decrement nCount value */
while (nCount != 0)
{
nCount--;
}
}
#ifdef USE_FULL_ASSERT
/**
* @brief Reports the name of the source file and the source line number
* where the assert_param error has occurred.
* @param file: pointer to the source file name
* @param line: assert_param error line source number
* @retval None
*/
void assert_failed(uint8_t* file, uint32_t line)
{
/* User can add his own implementation to report the file name and line number,
ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */
/* Infinite loop */
while (1)
{
}
}
#endif
stm8s_it.c
/**
******************************************************************************
* @file stm8s_it.c
* @author MCD Application Team
* @version V2.0.1
* @date 18-November-2011
* @brief Main Interrupt Service Routines.
******************************************************************************
* @attention
*
* THE PRESENT FIRMWARE WHICH IS FOR GUIDANCE ONLY AIMS AT PROVIDING CUSTOMERS
* WITH CODING INFORMATION REGARDING THEIR PRODUCTS IN ORDER FOR THEM TO SAVE
* TIME. AS A RESULT, STMICROELECTRONICS SHALL NOT BE HELD LIABLE FOR ANY
* DIRECT, INDIRECT OR CONSEQUENTIAL DAMAGES WITH RESPECT TO ANY CLAIMS ARISING
* FROM THE CONTENT OF SUCH FIRMWARE AND/OR THE USE MADE BY CUSTOMERS OF THE
* CODING INFORMATION CONTAINED HEREIN IN CONNECTION WITH THEIR PRODUCTS.
*
* <h2><center>© COPYRIGHT 2011 STMicroelectronics</center></h2>
******************************************************************************
*/
/* Includes ------------------------------------------------------------------*/
#include "stm8s_it.h"
#include "define.h"
extern u16 tempo;
/* Private typedef -----------------------------------------------------------*/
/* Private define ------------------------------------------------------------*/
/* Private macro -------------------------------------------------------------*/
/* Private variables ---------------------------------------------------------*/
/* Private function prototypes -----------------------------------------------*/
/* Private functions ---------------------------------------------------------*/
/* Public functions ----------------------------------------------------------*/
void BuzOsc(void)
{
static u8 porta=0;
GPIO_WriteReverse(Port_BUZ1,BUZ1);
porta=GPIO_ReadOutputData(Port_BUZ1);
if (ValBit(porta,5)) GPIO_WriteLow(Port_BUZ2,BUZ2);
else GPIO_WriteHigh(Port_BUZ2,BUZ2);
}
/** @addtogroup TIM1_7PWM_Output
* @{
*/
#ifdef _COSMIC_
/**
* @brief Dummy interrupt routine
* @param None
* @retval None
*/
INTERRUPT_HANDLER(NonHandledInterrupt, 25)
{
/* In order to detect unexpected events during development,
it is recommended to set a breakpoint on the following instruction.
*/
}
#endif /*_COSMIC_*/
/**
* @brief TRAP interrupt routine
* @param None
* @retval None
*/
INTERRUPT_HANDLER_TRAP(TRAP_IRQHandler)
{
/* In order to detect unexpected events during development,
it is recommended to set a breakpoint on the following instruction.
*/
}
CONTINUE.....
/**
* @brief Timer1 Update/Overflow/Trigger/Break Interruption routine.
* @par Parameters:
* None
* @retval
* None
*/
#ifdef _COSMIC_
@far @interrupt void TIM1_UPD_OVF_TRG_BRK_IRQHandler(void)
#else /* _RAISONANCE_ */
void TIM1_UPD_OVF_TRG_BRK_IRQHandler(void) interrupt 11
#endif /* _COSMIC_ */
{
BuzOsc();
TIM1_ClearITPendingBit(TIM1_IT_UPDATE);
return;
}
/**
* @brief Timer1 Capture/Compare Interrupt routine
* @param None
* @retval None
*/
INTERRUPT_HANDLER(TIM1_CAP_COM_IRQHandler, 12)
{
/* In order to detect unexpected events during development,
it is recommended to set a breakpoint on the following instruction.
*/
}
CONTINUE.....
#ifdef STM8S903
/**
* @brief Timer6 Update/Overflow/Trigger Interrupt routine
* @param None
* @retval None
*/
INTERRUPT_HANDLER(TIM6_UPD_OVF_TRG_IRQHandler, 23)
{
/* In order to detect unexpected events during development,
it is recommended to set a breakpoint on the following instruction.
*/
}
#else /*STM8S208, STM8S207, STM8S105 or STM8S103 or STM8AF62Ax or STM8AF52Ax or STM8AF626x */
/**
* @brief Timer4 Update/Overflow Interrupt routine
* @param None
* @retval None
*/
INTERRUPT_HANDLER(TIM4_UPD_OVF_IRQHandler, 23)
{
tempo++;
if (tempo>500)
{
/* Toggles LED */
GPIO_WriteReverse(Port_LED, LED);
tempo=0;
}
TIM4_ClearITPendingBit(TIM4_IT_UPDATE);
}
#endif /*STM8S903*/
define.h
/*
Configurazione I/O
By E.M.
*/
#define Port_BUZ1 (GPIOC)
#define BUZ1 (GPIO_PIN_5)
#define Port_BUZ2 (GPIOC)
#define BUZ2 (GPIO_PIN_4)
#define Port_LED (GPIOD)
#define LED (GPIO_PIN_0)
/*
www.emcu.it
By: Enrico M.
Date: 05-Febr-2012
ST Visual Develop: 4.3.1
Cosmic C Compiler: 4.3.6
STM Library: 2.1.0
PC: Vindows XP SP3
Tested on STM8S-Discovery
TEST POINT:
CN2 -> pin_6 and pin_5
On the pins you should see a square wave of about 0.1 mS.
The LED must blink arround of 500 mS
TIM4 - interrupt 1 mS
TIM1 - interrupt 100 uS
*/
/* Includes ------------------------------------------------------------------*/
#include "stm8s.h"
#include "define.h"
/* Private typedef -----------------------------------------------------------*/
/* Private define ------------------------------------------------------------*/
/* Private macro -------------------------------------------------------------*/
/* Private variables ---------------------------------------------------------*/
u16 tempo = 0;
/* Private function prototypes -----------------------------------------------*/
void TIM1_Config(void);
void TIM4_Config(void);
/* Private functions ---------------------------------------------------------*/
/* Public functions ----------------------------------------------------------*/
void Delay (uint16_t nCount);
/**
* @brief Main program.
* @param None
* @retval None
*/
void main(void)
{
// Configure Quartz Clock
CLK_DeInit();
CLK_HSECmd(ENABLE);
CLK_SYSCLKConfig(CLK_PRESCALER_HSIDIV1);
// Configure I/O x Buzzer
GPIO_Init(Port_BUZ1, BUZ1, GPIO_MODE_OUT_PP_LOW_FAST);
GPIO_Init(Port_BUZ2, BUZ2, GPIO_MODE_OUT_PP_LOW_FAST);
/* Initialize I/Os LED in Output Mode */
GPIO_Init(GPIOD, GPIO_PIN_0, GPIO_MODE_OUT_PP_LOW_FAST);
/* TIM1 configuration -----------------------------------------*/
TIM1_Config();
/* TIM4 configuration -----------------------------------------*/
TIM4_Config();
// SetUp BUZ1 & BUZ2
GPIO_WriteHigh(Port_BUZ1, BUZ1);
GPIO_WriteLow(Port_BUZ2, BUZ2);
// Enable Interrupts
enableInterrupts();
while (1)
{
}
}
/**
* @brief Configure TIM4 to generate time base 1mS
* @param None
* @retval None
*/
void TIM4_Config(void)
{
CLK_PeripheralClockConfig (CLK_PERIPHERAL_TIMER4 , ENABLE);
TIM4_DeInit();
/* Time base configuration */
TIM4_TimeBaseInit(TIM4_PRESCALER_128, 0x7D); // 127 and 0x7D == Interrupt 1mS
TIM4_ITConfig(TIM4_IT_UPDATE, ENABLE);
TIM4_Cmd(ENABLE); // Enable TIM4
}
/**
* @brief Configure TIM1 to generate time base
* @param None
* @retval None
*/
void TIM1_Config(void)
{
CLK_PeripheralClockConfig (CLK_PERIPHERAL_TIMER1 , ENABLE);
TIM1_DeInit();
TIM1_TimeBaseInit(16, TIM1_COUNTERMODE_DOWN, 92, 0); //timer freq = (clock CPU/16) -> 1bit = 1uS -> 92*1uS=92uS
TIM1_ITConfig(TIM1_IT_UPDATE, ENABLE);
TIM1_Cmd(ENABLE);
}
void BuzOsc2(void)
{
static u8 porta=0;
GPIO_WriteReverse(Port_BUZ1,BUZ1);
porta=GPIO_ReadOutputData(Port_BUZ1);
if (ValBit(porta,5)) GPIO_WriteLow(Port_BUZ2,BUZ2); // Attenzione 5 per poterlo usare con STM8S-Discovery
else GPIO_WriteHigh(Port_BUZ2,BUZ2);
}
/**
* @brief Delay
* @param nCount
* @retval None
*/
void Delay(uint16_t nCount)
{
/* Decrement nCount value */
while (nCount != 0)
{
nCount--;
}
}
#ifdef USE_FULL_ASSERT
/**
* @brief Reports the name of the source file and the source line number
* where the assert_param error has occurred.
* @param file: pointer to the source file name
* @param line: assert_param error line source number
* @retval None
*/
void assert_failed(uint8_t* file, uint32_t line)
{
/* User can add his own implementation to report the file name and line number,
ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */
/* Infinite loop */
while (1)
{
}
}
#endif
stm8s_it.c
/**
******************************************************************************
* @file stm8s_it.c
* @author MCD Application Team
* @version V2.0.1
* @date 18-November-2011
* @brief Main Interrupt Service Routines.
******************************************************************************
* @attention
*
* THE PRESENT FIRMWARE WHICH IS FOR GUIDANCE ONLY AIMS AT PROVIDING CUSTOMERS
* WITH CODING INFORMATION REGARDING THEIR PRODUCTS IN ORDER FOR THEM TO SAVE
* TIME. AS A RESULT, STMICROELECTRONICS SHALL NOT BE HELD LIABLE FOR ANY
* DIRECT, INDIRECT OR CONSEQUENTIAL DAMAGES WITH RESPECT TO ANY CLAIMS ARISING
* FROM THE CONTENT OF SUCH FIRMWARE AND/OR THE USE MADE BY CUSTOMERS OF THE
* CODING INFORMATION CONTAINED HEREIN IN CONNECTION WITH THEIR PRODUCTS.
*
* <h2><center>© COPYRIGHT 2011 STMicroelectronics</center></h2>
******************************************************************************
*/
/* Includes ------------------------------------------------------------------*/
#include "stm8s_it.h"
#include "define.h"
extern u16 tempo;
/* Private typedef -----------------------------------------------------------*/
/* Private define ------------------------------------------------------------*/
/* Private macro -------------------------------------------------------------*/
/* Private variables ---------------------------------------------------------*/
/* Private function prototypes -----------------------------------------------*/
/* Private functions ---------------------------------------------------------*/
/* Public functions ----------------------------------------------------------*/
void BuzOsc(void)
{
static u8 porta=0;
GPIO_WriteReverse(Port_BUZ1,BUZ1);
porta=GPIO_ReadOutputData(Port_BUZ1);
if (ValBit(porta,5)) GPIO_WriteLow(Port_BUZ2,BUZ2);
else GPIO_WriteHigh(Port_BUZ2,BUZ2);
}
/** @addtogroup TIM1_7PWM_Output
* @{
*/
#ifdef _COSMIC_
/**
* @brief Dummy interrupt routine
* @param None
* @retval None
*/
INTERRUPT_HANDLER(NonHandledInterrupt, 25)
{
/* In order to detect unexpected events during development,
it is recommended to set a breakpoint on the following instruction.
*/
}
#endif /*_COSMIC_*/
/**
* @brief TRAP interrupt routine
* @param None
* @retval None
*/
INTERRUPT_HANDLER_TRAP(TRAP_IRQHandler)
{
/* In order to detect unexpected events during development,
it is recommended to set a breakpoint on the following instruction.
*/
}
CONTINUE.....
/**
* @brief Timer1 Update/Overflow/Trigger/Break Interruption routine.
* @par Parameters:
* None
* @retval
* None
*/
#ifdef _COSMIC_
@far @interrupt void TIM1_UPD_OVF_TRG_BRK_IRQHandler(void)
#else /* _RAISONANCE_ */
void TIM1_UPD_OVF_TRG_BRK_IRQHandler(void) interrupt 11
#endif /* _COSMIC_ */
{
BuzOsc();
TIM1_ClearITPendingBit(TIM1_IT_UPDATE);
return;
}
/**
* @brief Timer1 Capture/Compare Interrupt routine
* @param None
* @retval None
*/
INTERRUPT_HANDLER(TIM1_CAP_COM_IRQHandler, 12)
{
/* In order to detect unexpected events during development,
it is recommended to set a breakpoint on the following instruction.
*/
}
CONTINUE.....
#ifdef STM8S903
/**
* @brief Timer6 Update/Overflow/Trigger Interrupt routine
* @param None
* @retval None
*/
INTERRUPT_HANDLER(TIM6_UPD_OVF_TRG_IRQHandler, 23)
{
/* In order to detect unexpected events during development,
it is recommended to set a breakpoint on the following instruction.
*/
}
#else /*STM8S208, STM8S207, STM8S105 or STM8S103 or STM8AF62Ax or STM8AF52Ax or STM8AF626x */
/**
* @brief Timer4 Update/Overflow Interrupt routine
* @param None
* @retval None
*/
INTERRUPT_HANDLER(TIM4_UPD_OVF_IRQHandler, 23)
{
tempo++;
if (tempo>500)
{
/* Toggles LED */
GPIO_WriteReverse(Port_LED, LED);
tempo=0;
}
TIM4_ClearITPendingBit(TIM4_IT_UPDATE);
}
#endif /*STM8S903*/
define.h
/*
Configurazione I/O
By E.M.
*/
#define Port_BUZ1 (GPIOC)
#define BUZ1 (GPIO_PIN_5)
#define Port_BUZ2 (GPIOC)
#define BUZ2 (GPIO_PIN_4)
#define Port_LED (GPIOD)
#define LED (GPIO_PIN_0)